애플리케이션 개발자들은 모바일, 자동차, 사물 인터넷(IoT), 산업 공간 등 광범위한 산업 시장에서 정확한 실내·외 위치정보를 인식할 수 있는 정밀 레인징(Ranging) 기술을 적극적으로 모색해왔다.

최근의 초광대역(UWB, Ultra-wideband) 기술은 Wi-Fi, 블루투스, GPS 등 다른 무선 기술과는 비교할 수 없을 만큼 정확하고 안전한 실시간 위치 정보 기술로 ‘재탄생’했다. UWB 장치 간 위치·이동·거리 등의 상황 정보 처리 기능을 통해 실시간으로 센티미터 단위의 정밀도로 시스템에 공간 인식을 추가함으로써 새롭고 흥미로운 다양한 애플리케이션을 구현할 수 있다.
UWB의 잠재력을 이해하기 위해선 ToF(Time of Flight, 비행시간 거리측정), AoA(Angle of Arrival, 도래각)을 고려하고 특히, UWB의 보안성을 측정하기 위해 UWB의 고유한 특성을 고려하는 것이 중요하다.
UWB 기반 자동차 스마트키
2019년 하반기, 자동차 업체들은 UWB에 기반해 수동 키 없이도 차량 문을 열 수 있는 기술을 구현하는 등 새로운 사용 사례를 소개했다. 그 예로는 차량 내 승객 탐지, 자동 발렛 주차, 핸즈프리 주차, 드라이브 스루 지불 등 무수하다. 미래에는 스마트폰으로 ‘키가 필요 없는 차량 탑승 기능(PKE, Passive Keyless Entry)’을 구현하는 데 사용되는 것도 기대되는 부분이다.
PKE 기술은 기계적인 키를 사용하지 않아도 자동차의 잠금을 해제하고 시동을 걸 수 있도록 한다. 스마트키(키 포브, Key fob)가 운전자의 주머니나 가방에 들어있더라도 그것이 적당한 거리 내에 있으면 자동차가 ‘활성화’돼 차량 문의 잠금장치가 해제된다. 또한, 스마트키가 차량 내에 있으면 자동으로 탐지돼 자동차 시동 버튼이 활성화된다.
PKE 기능이 자동차 제조업체 사이에서 인기를 끄는 이유는 이 기능이 아주 편리할 뿐 아니라 고객들에게도 반응이 좋기 때문이다. 또한, 조향 핸들 축관에서 부피를 많이 차지하는 키박스 통을 제거할 수 있어 차체를 경량화하고, 이로 인해 차량 충돌 시 무릎 부상의 위험도 줄어든다.
소비자들의 인기를 끄는 이유는 차량의 문을 열고, 시동을 켜고, 잠금을 시도할 때 키를 꺼내 작동할 필요가 없어 편리성이 높기 때문이다.
차량 해킹, 릴레이 공격
안타까운 사실은 수많은 스마트키가 신종 차량 범죄에 사용되고 있다는 점이다. 절도범들은 저렴하고 쉽게 구할 수 있는 해킹 기기를 사용해 자동차의 ‘활성(Wake up)’ 신호를 탐지하고, 이 신호를 다시 스마트키로 송신해 강제로 잠금 해제 신호를 발동시킨다. 이 신종 범죄를 ‘릴레이 공격(Relay attack)’이라고 한다.
릴레이 공격이 가능해진 이유는 현재 일부 스마트키가 타임스탬프(Timestamp) 대신 신호 강도를 사용해, 차량 소유자의 키가 2m 이내의 차량 위치 여부를 탐지하기 때문이다. 릴레이 공격은 보통 두 명의 절도범을 필요로 하는데, 한 명은 차량 소유자의 차 키 근처, 다른 한 명은 차량 근처로 접근한다.
차량 소유자가 쇼핑몰, 카페, 레스토랑 등 외부에 있거나 혹은 자택에 있으면서, 자동차 차 키는 건물의 입구 통로 근처나 창문 가에 놓여있다고 가정하자. 절도범 1은 차량의 키 근처로 접근해 해당 차량이 차 키를 탐지하기 위해 송신하는 동일한 종류의 쿼리(Query)를 차 키에 송신한다. 차량 소유자의 차 키가 그 쿼리에 반응하고 차 키가 근거리 범위내에 있음을 알리면, 절도범 1은 이 수신 신호를 복사해 차량 근처의 절도범 2에 송신(릴레이)한다. 절도범 2는 수신 신호를 통해 해당 차량의 문을 열고 시동을 건다.
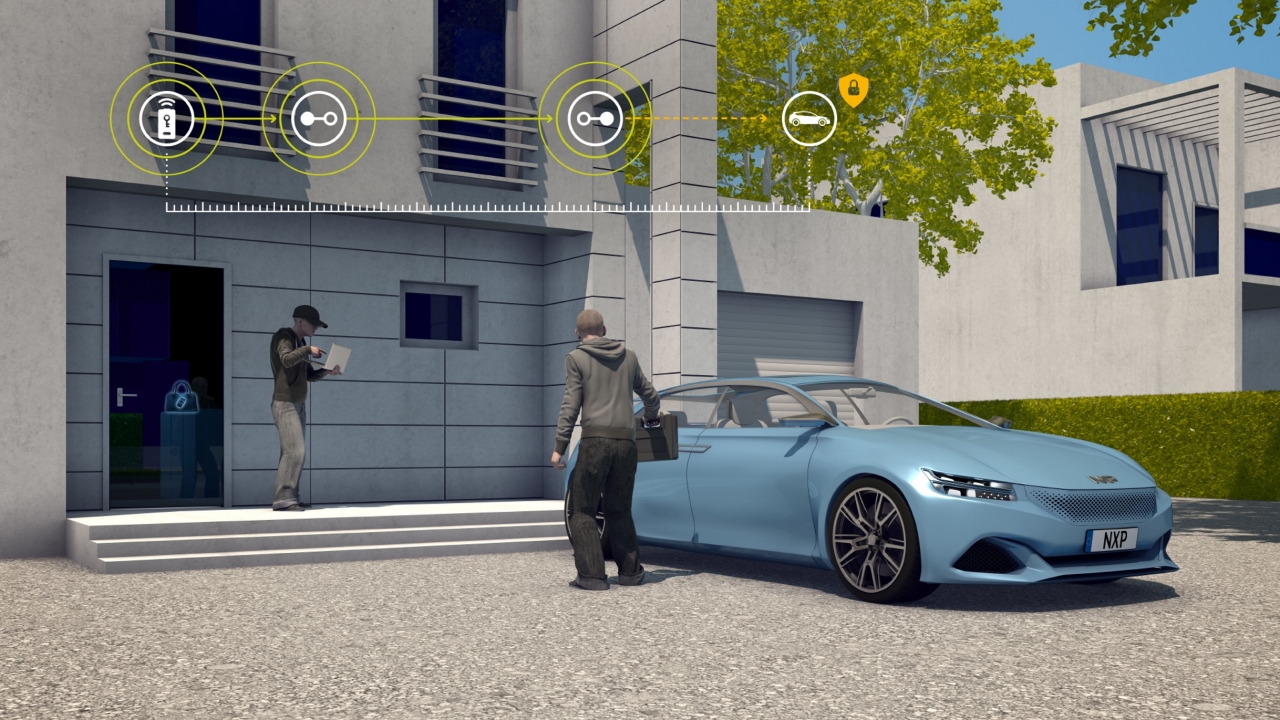
PKE 기능과 스마트폰을 활용한 차량 탑승 기능에 UWB가 사용되면서 릴레이 공격을 방지하는 데 ToF 계산이 효과적으로 사용된다. 이는 절도범이 검색하는 모든 신호를 타임스탬프로 표시해 신호가 범위 외 위치에서 생성됐음을 알린다. 신호가 차량에 도달하는 시점으로 계산된 ToF는 발생 신호가 너무 멀리 떨어져 차량 문을 열 수 없는 어느 지점에서 발생했다는 것을 보여준다. 낮 시간대의 영화관람권을 가진 관람객은 티켓에 적혀 있는 입장 시간이 만료돼 심야 영화에 입장할 수 없는 것처럼, 불법 복제된 UWB 신호도 적정 시간에서 벗어난 잘못된 시간을 나타내기에 차량 탑승을 막아준다.
UWB 기술 초기 단계와 현황
UWB는 1960년대에 레이더 애플리케이션에 활용하는 것을 목적으로 처음 개발됐다. 이후 OFDM(Orthogonal Frequency-division Multiplexing) 기술로 사용되도록 개조됐고, IEEE.15.3에서 최대 480Mbps의 초고속 데이터 전송 기술로 표준화됐다. 기술 부문에서 UWB는 Wi-Fi와 직접적으로 경쟁하게 됐고 금세 데이터 전송력과 전송 사례에서 Wi-Fi를 능가했다.
UWB의 또 다른 특징인 임펄스 라디오(Impulse radio, IR) 방식은 더욱 성공적인 성과를 거뒀다. IEEE 802.15.4a 표준에 기술된 바와 같이 UWB는 ToF와 AoA 측정에 2ns(나노초) 펄스를 사용한다. 얼마 지나지 않아 UWB의 보안 기능은 IEEE 802.15.4z(PH/RF 레벨)에 명시된 것과 같이, 확장된 기능으로 독보적이고 안전한 정밀 레인징·센서 기술을 갖춘다.
스마트폰을 자동차의 잠금 해제와 시동을 걸기 위한 스마트키로 활용하는 것은 꽤 설득력 있는 발상이다. 자동차와 스마트폰 업계 선두 기업들은 802.15.4z 표준의 보안 메커니즘 정의 구축에 적극적으로 동참하고 있다. 그렇다면 UWB 기술은 어떻게 획기적인 정밀도로 이런 중요한 사용사례 구현에 활용될 수 있는 것일까? 이에 대한 배경과 맥락을 살펴보자.
UWB 기술의 주요 차별점
UWB 기술은 대부분의 무선 기술과 달리 임펄스 라디오 방식으로 작동된다. UWB는 넓은 주파수 대역에서 일련의 임펄스를 통해 작동해 임펄스 라디오 UWB 또는 IR-UWB라고 불린다. 이와 달리, 위성, Wi-Fi, 블루투스는 좁은 주파수에 걸쳐 변조된 정현파(Sine wave)를 통해 정보를 전송한다.
UWB 펄스에는 중요한 특징이 몇 가지 있다. 먼저, UWB 펄스는 폭이 극히 가파르고 좁아 소음이 큰 채널 환경에서도 식별하기 쉬운 스파이크로 보인다. ToF 레인징 측정 시, UWB 펄스는 Wi-Fi나 블루투스와 같은 다른 기술에 비해 다중경로가 밀집된 환경에 더 적합하다. 둘 이상의 경로로 수신기에 도달하는 전파 신호는 단일 주요 신호 경로 근처의 물체에서 발생하는 반사 또는 방해로 인해, 시간이 오래 걸리고 협대역 시스템으로 제한된 IR-UWB(Impulse Radio Ultra-wideband)와 쉽게 구별된다.
UWB가 약 2.4GHz로 클러스터링된 혼잡한 ISM 대역(Industry-Science-Medical band)에서 벗어나 무선 스펙트럼의 다른 부분에서 작동하는 것도 특징이다. 위치정보 인식과 레인징에 사용되는 UWB 펄스는 6.5~8GHz의 주파수 범위에서 작동하며 스펙트럼의 해당 범위 외에 발생하는 무선 전송과는 간섭하지 않는다. 이는 UWB가 위성 내비게이션, Wi-Fi, 블루투스 등 많이 사용되는 무선 통신 시스템과 공존할 수 있다는 뜻이다.
일반적인 전력 기반의 UWB의 최대 전송 거리는 10m지만, 고전력 임펄스를 사용하면 최대 200m까지 늘어난다. UWB 통신도 데이터 전송을 할 수 있으며, UWB 패킷의 페이로드 영역에서의 데이터 전송 속도는 약 7Mbps, 최대 32Mbps까지 빨라질 수 있다.
현재 UWB는 매우 짧은 2ns의 변조된 펄스열을 사용한다. 펄스 간 간격은 균일하거나 균일하지 않을 수 있다. 펄스 반복 주파수(PRF, Pulse Repetition Frequency), 즉 초당 펄스의 수는 수십만 개에서 수십억 개에 이른다. 일반적으로 지원되는 PRF는 PRF64로 알려진 62.4MHz와 PRF128로 알려진 124.8MHz가 있다. UWB의 변조 방식에는 펄스 위치 변조(PPM, Pulse Position Modulation)와 2진 위상 편이 변조(BPSK, Binary Phase Shift Keying)가 있다.
ToF 계산
과학·군사 애플리케이션에서 두 지점(혹은 장치) 간 수평 거리를 결정하는 과정을 레인징(Ranging)이라고 한다. ToF(Time of Flight)는 신호의 이동 시간을 사용해 거리를 측정하는 레인징의 한 형태다. [그림 2]는 UWB가 장착된 두 장치에서의 ToF 계산 작동원리를 설명한다.
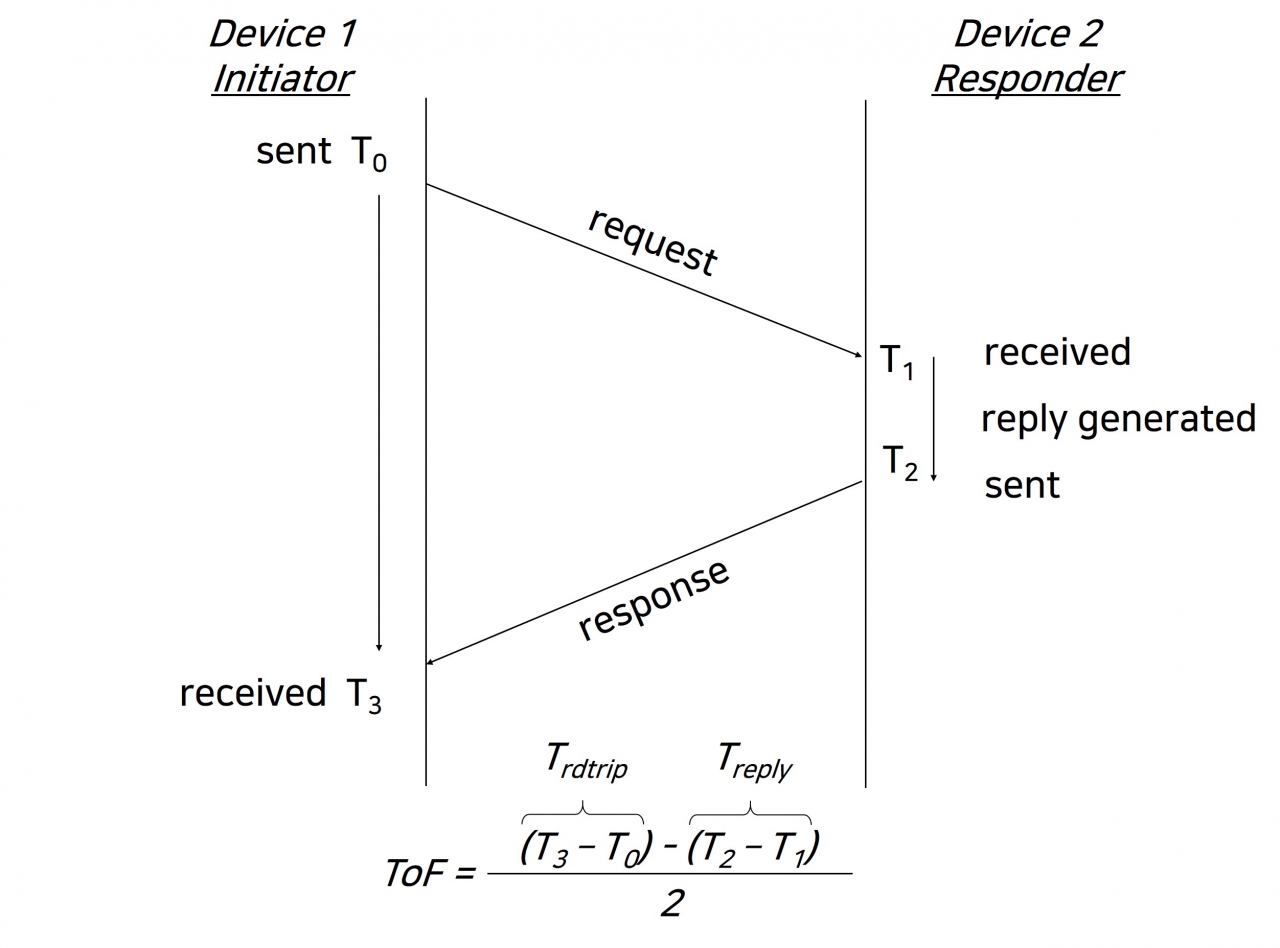
ToF를 계산하기 위해서는 도착 지점부터 B지점까지의 신호 이동에 걸리는 시간을 측정한다. 메시지의 왕복 이동 시간을 측정하고 이는 장치 2의 처리 시간을 포함한다. 여기에서 처리 시간을 빼고 2로 나눈다. 여행하는 동안 얼마나 이동했는지를 계산하기 위해 ToF에 빛의 속도를 곱한다.
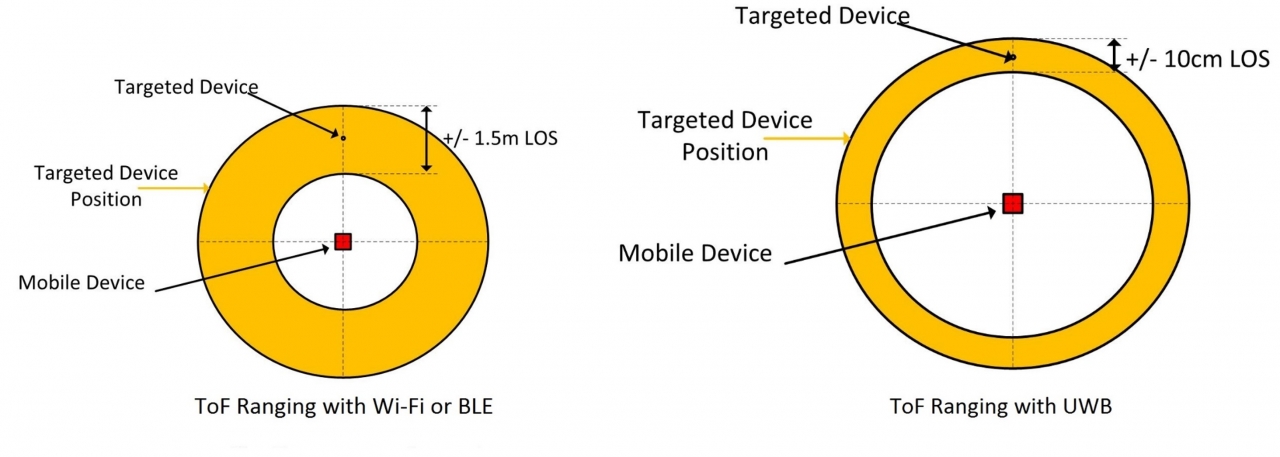
UWB의 높은 대역폭(500MHz)으로 인해 펄스는 나노초 폭에 있어 더 높은 정밀도를 허용한다. 좁은 대역의 송수신기가 있는 Wi-Fi와 블루투스와 달리, ToF와 레인지의 정확도는 +/-1~+/-5m 정도로 제한되며, UWB는 +/-10cm 이내까지 도달한다.
UWB 신호는 다중 경로 환경에서 상당히 뚜렷하고 구별이 쉬워, 펄스가 출발하고 도착하는 시간을 높은 수준의 확실성으로 식별하기에 더 용이하다. UWB는 높은 전송 속도로 펄스를 정확하게 추적할 수 있고 단기 폭발(Short bursts)로 많은 수의 펄스를 보낼 수 있어, 매우 가까운 범위에서도 미세한 ToF를 계산할 수 있다.
Wi-Fi나 블루투스를 사용해 위치를 결정할 때 발생하는 변조된 정현파의 다중 경로 구성요소를 분리하는 방법은 복잡하다. Wi-Fi와 블루투스가 1m 이하에서 정확한 측정치를 전달하기 어려운 이유도 여기에 있다. [그림 3]은 UWB ToF 계산 방식을 Wi-Fi와 블루투스와 비교해 보여준다.
선택적 도래각 계산
ToF 계산은 방향이 아닌 방사상 거리(Radial distance)를 결정한다는 점을 주시할 필요가 있다. 즉, ToF 계산은 장치 2가 얼마나 멀리 떨어져 있는지 장치 1에 알려 주지만, 어느 방향(앞, 뒤, 오른쪽, 왼쪽, 동서남북 등)인지는 알려주지 않는다.
ToF 도표가 원형인 이유는 다음과 같다. ToF 계산을 통해 장치 2가 장치 1에서 15cm 떨어져 있다고 나타낼 경우, 장치 1에서 측정테이프를 이용해 15cm 떨어진 곳에 원을 만들 수 있는데 이때 원 내에서는 어느 방향, 어느 지점이든 장치 2의 위치가 될 수 있다. 추가적인 장치를 이용한 두 번째 측정을 통해 두 원의 교차점으로 장치 2의 위치를 결정할 수 있다.
UWB 기술에 대한 논의를 마무리하려면, 현재 비자동차 부문의 애플리케이션에서 중요한 요소인 도래각(AoA, Angle of Arrival)을 고려해야 한다. 이는 원 위에서 장치 2의 위치 인식에 도움을 준다. AoA 계산을 위해서는 장치 1에 AoA 측정 전용인 위치를 주의 깊게 정한 안테나 세트가 있어야 한다. 모든 UWB 솔루션에는 여분의 안테나가 포함되지 않으나, 수 cm 이내의 정확도가 요구될 때는 여분의 안테나가 필요하다.
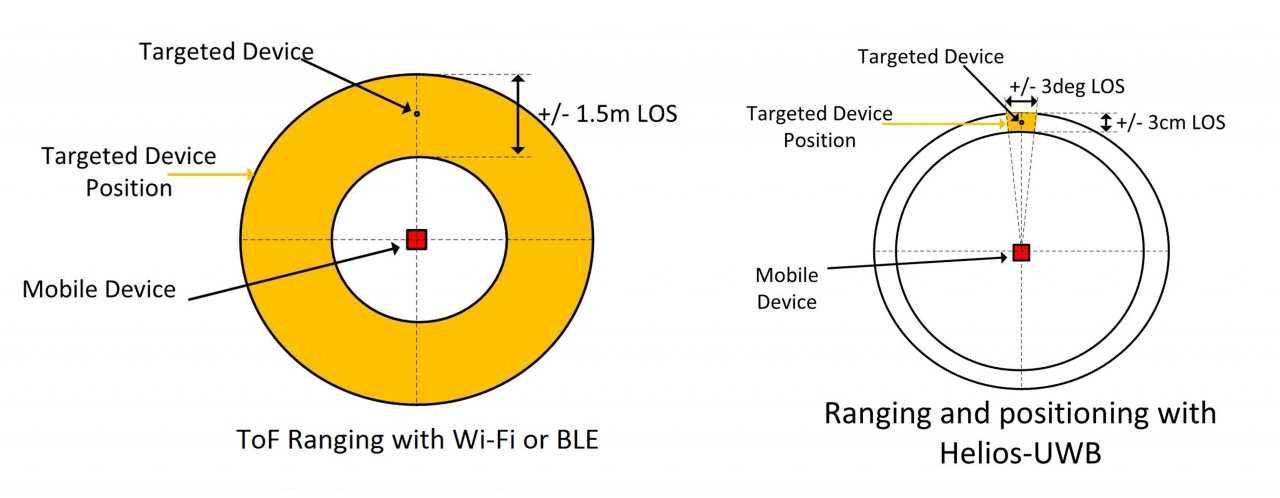
AoA 계산은 ToF 계산과 별개로 구별되나, AoA 계산이 펄스 시간 측정에서 시작하는 점이 ToF 계산과 유사하다. AoA 배열 안테나의 각 안테나에는 도착 시간과 수신한 각 신호의 위상에서 구별할 수 있는 작은 차이가 있다. 각 신호의 도착 시간과 위상이 기록되며, 이는 신호의 발신지를 결정하는 삼각측량(Triangulation)과 유사한 기하학적 계산에 사용된다.
그림 의 좌측 도표는 장치 1의 두 개의 AoA 안테나, 즉 Rx1과 Rx2를 나타낸다. 장치 2의 신호가 Rx2보다 Rx1에 도달하는 데 더 오래 걸리며, Rx1와 Rx2에 의해 형성된 삼각형과 신호의 원점은 우측으로 기울어지는 삼각형을 형성한다. 이는 장치 1의 북동쪽에서 신호가 오고 있다는 것을 의미한다.
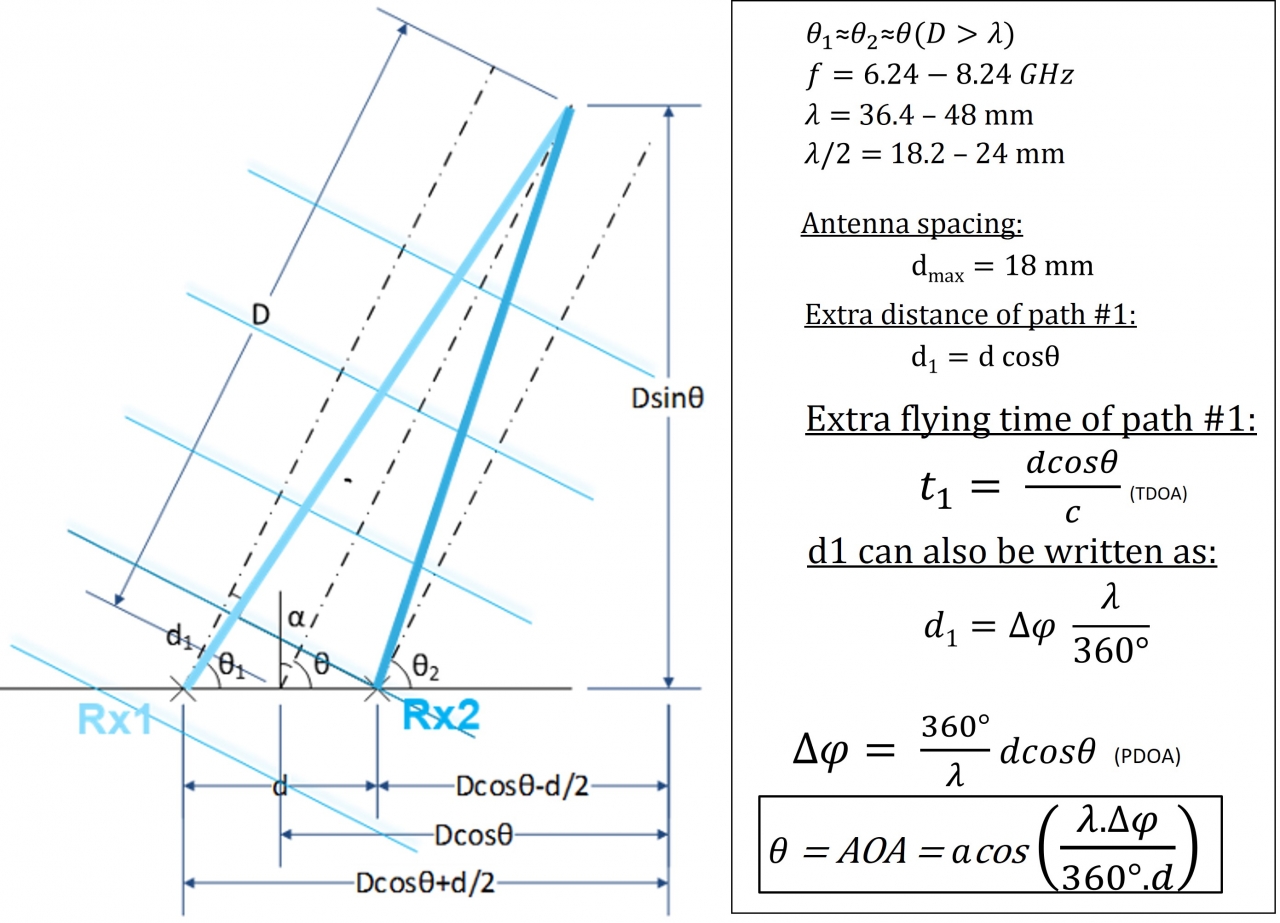
장치 2에서 장치 1로 이동하는 신호는 Rx2보다 Rx1에 도달하는 데 더 오래 걸린다. [그림 5]의 도표 우측에 나타난 AoA 계산은 각 안테나에 신호가 도착하는 시간과 안테나 간격을 통해 각 수신 신호의 각도를 결정하고, 이로부터 Rx1, Rx2, 장치 2를 꼭짓점으로 삼각형을 그릴 수 있다. 이 삼각형은 장치2와 Rx1을 연결하는 변이 더 길고 오른쪽으로 기울어 있는데, 이는 장치 2가 장치 1의 오른쪽에 있음을 뜻한다.
UWB의 보안
새로운 802.15.4z 규격의 일부로 정의되는 UWB의 중요한 추가 사항 중 하나는 데이터 패킷을 송수신하는 데 사용되는 물리 계층(PHY, Physical Layer)의 추가적인 부분이다. NXP 반도체는 암호, 난수 생성, 기타 기법을 UWB에 추가해 외부의 공격자가 UWB 통신에 접근하거나 조작하는 것을 막아주는 STS(Scrambled Timestamp Sequence) 기능을 개발해 고객에 제공하고 있다.
ToF 계산은 거리 조작에 취약하다. 타임스탬프나 계산의 다른 측면에 간섭을 일으키면, 간섭을 일으킨 대상이 실제보다 근거리에 있는 것으로 보일 수 있다. 이는 보안 출입 기능과 같은 특정 애플리케이션에서 그 시스템을 교란해, 허가된 사용자가 실제보다 근거리에 있는 것으로 보이도록 해 잠금장치를 해제하는 심각한 문제를 야기할 수 있다.
10여 년 전 출시된 레인징에 대한 UWB의 본래 표준인 802.15.4a는 오늘날과는 달리 보안 성능을 강조하지 않았다. 연구자들은 4a 표준을 테스트하는 과정에서 외부 침입자가 99% 이상의 확률로 측정 거리를 140m까지 단축할 수 있다는 것을 발견했다. 이와 같은 특정 취약성에 대한 우려가 4z 표준 개정 작업을 촉진하기도 했다.
이 개정 작업은 PHY 패킷에 암호키와 숫자의 무작위성을 추가함으로써 ToF 관련 데이터에 대한 접근이나 예측을 불가능하게 하는 것에 착안했다. UWB PHY의 뚜렷하고 예측 가능한 본래 특성은 거리 판독을 조작하기 위한 시카다(CICADA) 공격, PI(Preamble Injection), EDLC(Early Detect/Late Connect) 공격 등 다양한 외부 공격 해결에 도움이 된다. 또한, 개선된 접근법은 거리 측정을 조작하는 무차별 대입 공격(Brute Force Attack)으로부터 최선의 보호 체제를 제공한다.